Kui möödasõit on olnud isesõitvate autode jaoks üks keerukamaid manöövreid, milles inimene siiani veel masinat ületab, siis Tallinna Tehnikaülikooli uurimisrühm eesotsas Raivo Selliga on töötanud välja uue algoritmi, mis toob kaasa olulise muutuse.
Väljaandes Journal of Field Robotics ilmunud artiklis kirjeldavad teadlased simulatsioone ja reaalseid katseid, mille tulemused kinnitasid, et uus algoritm tagab võrreldes kahe standardmeetodiga oluliselt sujuvama ja usaldusväärsema liikumise, lähenedes sellega kogenud inimjuhile omase manöövri tasemele.
Tulemusi võib peagi näha laiemalt
Tänu uuele algoritmile muutub isesõitva auto möödasõit seega sujuvamaks, kiiremaks ja ohutumaks, säilitades manöövri ajal vajaliku ohutuskauguse. Ehkki inimjuhiga võrreldavat taset veel ei saavutata, on uus algoritm siiski oluline praktiline edasiarendus autonoomsete minibusside tehisintellekti võimekuses sooritada inimjuhiga samaväärseid manöövreid.
Tallinna Tehnikaülikooli inseneriteaduskonna tootearenduse ja robootika programmijuht, tenuuri kaasprofessor Raivo Sell rõhutab, et uut meetodit testiti juba kuulsaks saanud TalTechi iseAuto peal ning peagi võib tulemusi laiemalt näha.
“Selle teadustöö tulemusel on juba käimas edukas koostöö Aalto ülikooli uurimisgrupiga, rakendades nende masinõppe teoreetilist mudelit meie praktiliselt isejuhtivate sõidukite peal, mis tegeleb turvalisuse tõstmisega ja lisab möödasõidu katkestamise algoritmi. Seda juhuks, kui turvalisus seda nõuab,” lisab Sell.
Tema sõnul on käesolev uurimistöö hea näide praktilisest koostööst TalTech autonoomsete sõidukite uurimisgrupi, targa linna tippkeskuse ja Aalto ülikooli vahel.
Isesõitvate autode hulk kasvab peagi hüppeliselt
Mitmetes linnades üle maailma on oodata peagi isejuhtivat sõidukite, sh autonoomsete väikebusside kasutuselevõttu. Tõsi, enamik selliseid projekte on siiski veel katsetamise faasis. Probleemiks on, et sellised masinad suudavad küll täita arendajate ootusi rangelt kontrollitud keskkonnas, aga ei tule toime nt ootamatutes olukordades.
Üks põhilisi manöövreid, mida oodatakse, on vältida kokkupõrkeid, näiteks pargitud sõidukiga, muutes selleks sõidurada. Kui inimestele tundub see lihtsa ülesandena, on enamikul müügil olevatest 4. taseme isejuhtivatest masinatest selle ülesande täitmisega raskusi. Nii vastavate uuringute kui ka tootjate eesmärk ongi parandada sõidukite ohutust, vähendada liiklusõnnetuste arvu ja sõidukite keskkonnamõju.
Kui esimese põlvkonna isejuhtivad autod, mis suutsid lihtsate algoritmide tõttu sõita ainult väga kindlates struktureeritud keskkondades, siis nüüd eeldatakse, et uued isejuhtivad 4. ja 5. taseme sõidukid peaks suutma vastata peaaegu inimjuhtide põhioskuste tasemele.
See tähendab, et isejuhtimise algoritm peab toetama aina keerukamaid toiminguid, nagu on reavahetus, möödasõit, reageerimine ootamatutele loodusnähtustele jne.
Möödasõidu algoritm kui tohutu väljakutse
Erinevad andmed näitavad, et ca kümnendik õnnetustest on ühel või teisel moel seotud sõidukite reavahetusega. Seega, kui isegi inimjuhtide jaoks on see tõsine probleem, on see isejuhtivate autode arendajatele veel eriti suureks väljakutseks.
Möödasõidualgoritmid nõuavad n-ö igakülgset teavet ümbritseva keskkonna kohta, seda igas suunas ning olukorras, lisaks keerulisi arvutusi nii staatiliste kui ka dünaamiliste objektide kohta.
Algoritmi väljatöötamisel tuleb arvestada ka muude probleemsete teguritega, nagu erinevad ilmastikutingimused, erinevad liiklusolukorrad, aga ka suhtlus teiste liiklejatega, sh nii autod, jalakäijad kui ka ette joosta võivad loomad, erinev tee kvaliteet jne.
Teadlaste oluline roll isejuhtivate autode arendustöös
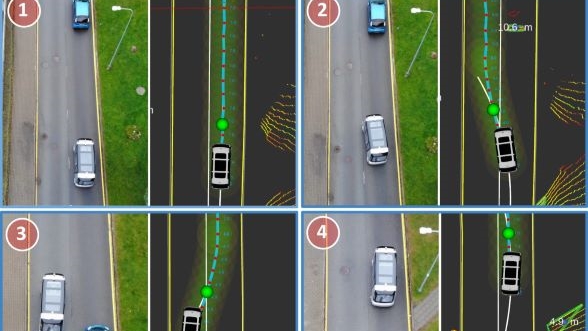
Autonoomsete sõidukite uurimisrühma juht Raivo Sell ja uurimisrühma teadlased Ehsan Malayjerdi, Mohsen Malayjerdi, Andres Udal ja Mauro Bellone rõhutavad artiklis olulisemate tulemustena, et nende uus meetod lubab isesõitval autol möödasõidu ja reavahetuse otsuseid teha senisega võrreldes palju kiiremini. Samuti on tegemist turvalise teekonna planeerimisega, sest näitab selgelt, milline on ohutu rada, kasutades selleks katsete tulemusel tõestatud andmeid.
Uue algoritmi puhul on täiustatud nii inimese kui ka masina liidest, mis annab n-ö teada möödasõidu kavatsusest. Lisaks saab väita, et tegemist on ohutut möödasõidumanöövrit lubava meetodiga, mille käigus luuakse kõigile liiklusreeglitele vastav teekond, mida on kontrollitud simulatsiooni abil ja seejärel rakendatud isesõitval masinal, kinnitades sellega meetodi turvalisust ja usaldusväärsust.