Õnnetusjuhtumite korral ohvrite otsimine võib osutuda keeruliseks ülesandeks, eriti kui asjaga on seotud varing. Sellisel juhul tulevad appi erinevad otsingurobotid, kuid ilmselt vähesed neist suudavad pääseda kohtadesse, kuhu pääses hiljuti päris õnnetusjuhtumi puhul kasutatud robootiline madu.
Carnegie Melloni ülikooli teadlaste loodud metallist robootilist madu testiti Mexico City’s, mida tabas hiljuti maavärin ning mille tulemusel ka mitmed majad kokku varisesid. Robot saadeti maja rusude vahele roomama, et seal lõksus olevaid ohvreid leida. Siiski robotil ühtegi ohvrit leida ei õnnestunud.
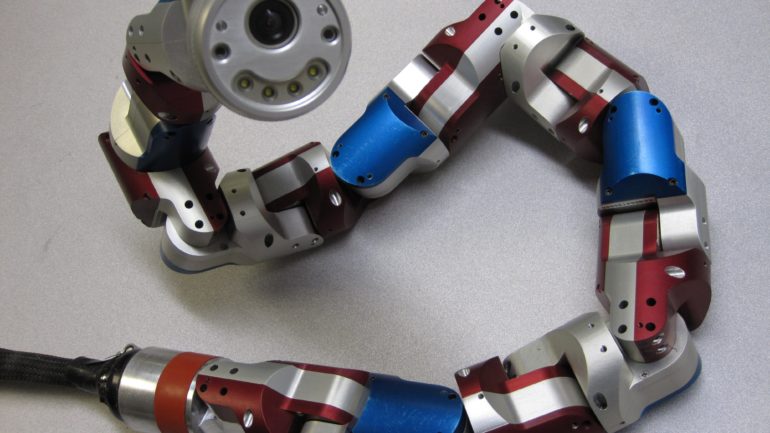
Robot on varustatud kaameraga, mis päästjatele pilti edastab. Seega saab see roomata rusude vahel, kuhu ükski tavaline kaamera või päästja ei pääseks, ning üritada leida ohvreid.
Mexico City’s kasutatud robotmao pikkuseks on 94 cm ning selle läbimõõt on 5 cm. Roboti külge on ühendatud ka voolu- ning kontrollkaabel, seega selle liikuvus on mõnevõrra piiratud, kuna tuleb arvestada ka juhtmetega. Robot koosnes 16 erinevast moodulist ning roboti “pea” koosneb kaamerast ning tuledest.
Robot suudab liikuda kui tavaline madu, kuid vajadusel võib see ka end näiteks keerutada, pakkudes seega rohkem võimalusi ühest kohast teise jõudmiseks.