Tallinna Tehnikaülikoolis äsja kaitstud doktoritöö uurib, kuidas juhtida autonoomset drooni, mis on manööverdusvõimeline kõigis liikumissuundades, aga mehaaniliselt nii lihtne kui võimalik.
Kui kellelgi on võimalus olnud juhtida lennukit või lennusimulaatorit, siis on tal tõenäoliselt esialgu olnud keeruline hakkama saada olukorras, kus tüüride liigutamine põhjustab lennuki pööramist mitte ainult soovitud suunas, vaid ka ümber teise pöörlemistelje. Vähemalt saab sama nähtust kogeda, kui ennast jalgrattal kallutades see ühtlasi pöörab.
Veel keerulisem on sellist masinat automaatselt juhtida. Ning veelgi keerulisem on automaatselt juhtida kolmemõõtmelises ruumis (õhus või vees) liikuvat drooni, millel on palju liikuvaid pindasid ning millelt nõutakse head manööverdamisvõimet suurtel kiirustel ning väliste häiringute, näiteks tuule või hoovuste, mõjuväljas.
Walid Remmase doktoritöö “Uimedega autonoomsete veesõidukite modelleerimis- ja juhtimisloogika edendamine” uuribki, kuidas juhtida autonoomset drooni, mis on manööverdusvõimeline kõigis liikumissuundades, aga mehaaniliselt nii lihtne kui võimalik.
Selline droon on kahjuks lennukile sarnaselt ebamugava omadusega, mille puhul ühe vabadusastme suunas mootorite liigutamine põhjustab drooni liikumist ka mõnes teises suunas. Drooni juhtimismeetodite väljaarendamiseks on autor kasutanud drooni matemaatilist kirjeldust ning sellele põhinevat juhtimisalgoritmi, mis lahendab nn pöördülesande: kui palju peab “valesid” liikumissuundasid aktiveerima, et liikuda “õiges” suunas ning arvutada igal ajahetkel sõiduki trajektoor välja piisavalt kiiresti.
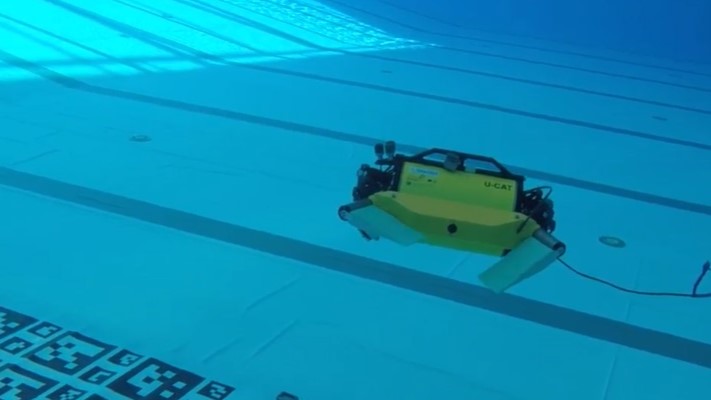
Erinevalt katse ja eksituse meetodil töötavast juhtimisest saab sellise täpse matemaatilise lähenemise puhul tõestada, et roboti juhtimine mööda soovitud trajektoori on garanteeritud. Teadustöö autor näitab Tallinna Tehnikaülikoolis välja töötatud 4 uimega allveeroboti U-CAT abil, et sellist robotit saab liigutada kõigis kolmes suunas ruumis ning pöörata kõigi ruumi telgede ümber, ehk et 4 mootoriga saab juhtida 6 vabadusastmega drooni. Veelgi enam, U-CATi on unikaalse mehaanilise ülesehitusega, nii et see ei kaota oma töövõimet ka juhul, kui osa mootoreid on töövõimetud.
Nimetatud teadustöö võimaldab tulevikus saata nii õhu- kui veedroone keerulisematesse keskkondadesse keerulisemaid ülesandeid täitma. Ühtlasi näitab autor, kuidas selline droon suudab järgneda sukeldujale, kes vee all näiteks peatub, ringi pöörab ning sügavust muudab.
Doktoritöö on valminud Montpellieri Ülikooli ja TalTechi koostöös ning Prantsuse Saatkonna Parrot stipendiumi toetusel. Montpellieri Ülikoolist on juhendajaks professor Ahmed Chemori ning TalTechist professor Maarja Kruusmaa. Oponentideks on professorid Tor Arne Johansen Norrast ja Luc Jaulin Prantsusmaalt. Doktoritöö kaitsmine toimus 18. detsembril.
Uudis ilmus ka teadusportaalis Novaator.